RCNN, Fast-RCNN, Faster-RCNN
1. RCNN(Regions with CNN)
- CNN 공부하다보면 어떤 곳에서는 Region Proposal을 network 안에 포함하여 설명하는 글이 있음
- CNN에 Region Proposal을 넣은 것이 RCNN
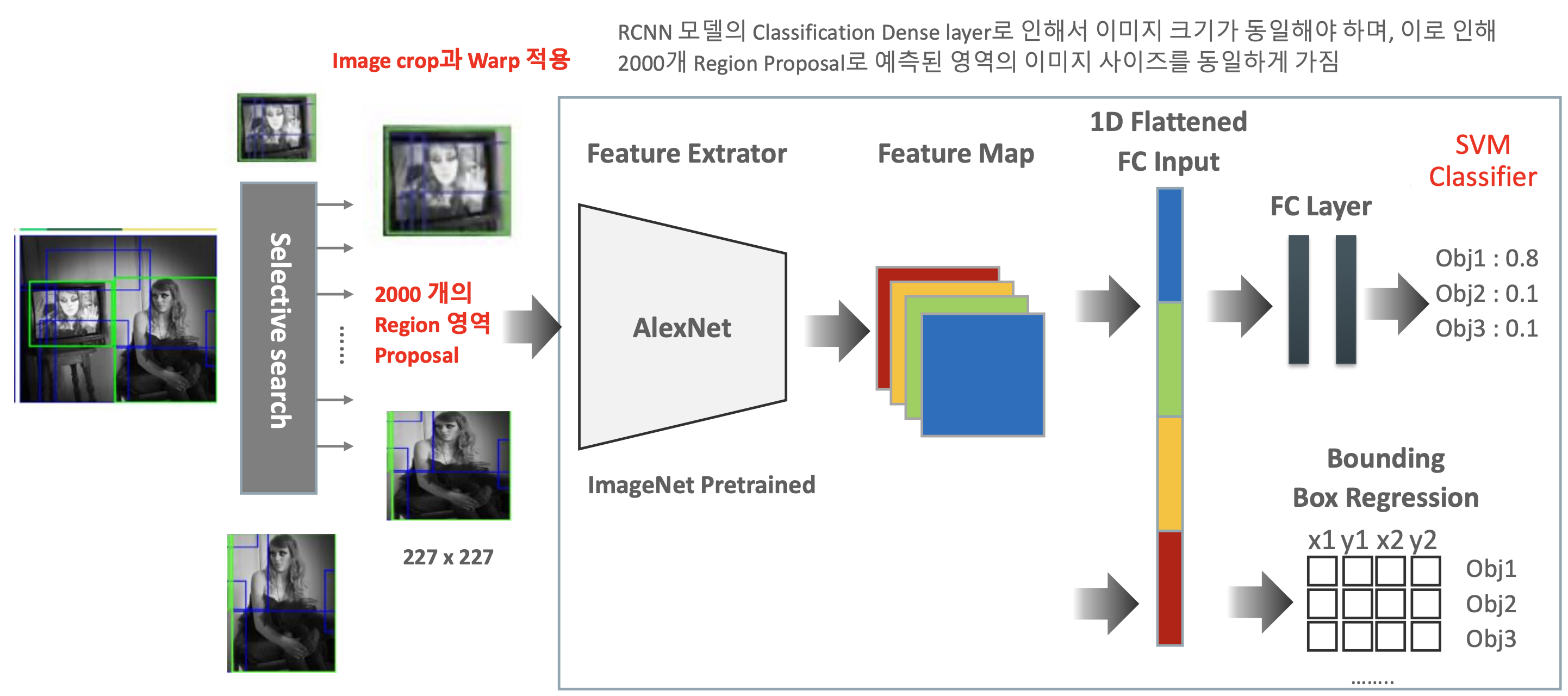
- 단일 이미지에 대해 Selective Search를 이용하여 2000개의 Region proposal
- Selective Search를 통해 나온 이미지들을 AlexNet에 넣기 위해서는 227*227 image crop
- 마지막에 classification을 위해 사용했던 softmax 대신 SVM를 채택하여 성능이 향상됨.
- SVM(Support Vector Machine) : 특정 함수를 만족하는 regression line은 무수히 많지만 그 중에서 잔차의 합이 최소가 되는 line을 찾는 방법
- 성능은 향상됐으나, 약 2000개의 crop image를 processing하기 때문에 시간이 오래 걸림
- object detection 및 region proposal 성능 입증
RCNN Training
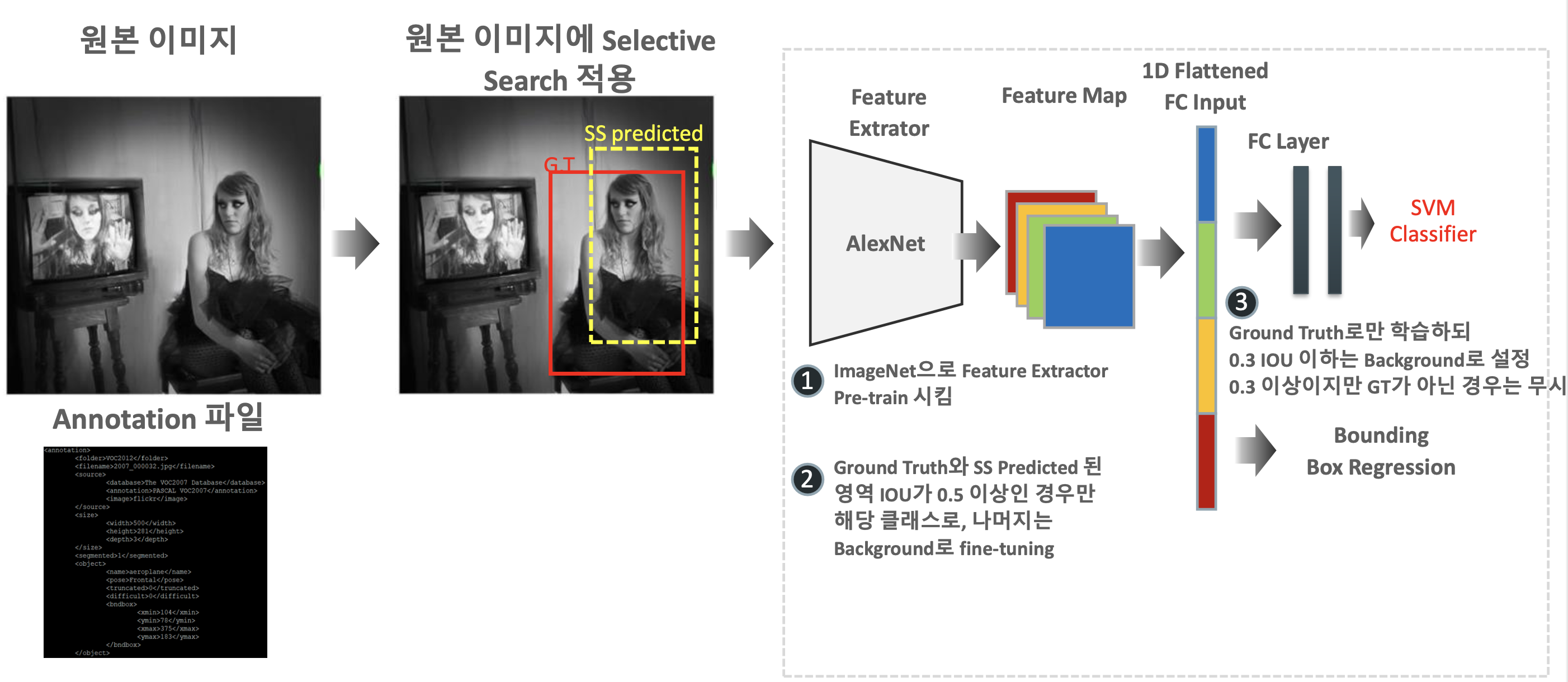
- 데이터 셋 상 Annotation file기반 Ground truth와 Selective Search를 통한 predicted bounding box 확인
- 1000개의 class로 되어있는 ImageNet으로 Feature Extractor pretraining
- pretrained model에 사용할 데이터 셋을 fine-tuning
- Gronud truth와 Selective Search bounding box 간 IoU가 특정 threshold(PASCAL 데이터 셋일 때 0.5일 것으로 보임)이상인 것들만 학습을 시키고 나머지는 background로 find-tuning
- 만들어진 Feature Map을 이용한 1D FC input이 만들어짐
- SVM을 이용한 Ground truth만을 기준으로 학습하되 IoU가 0.3 이하는 background로 설정, 0.3이상인데 GT가 아닌 것은 무시???
Bounding Box Regression
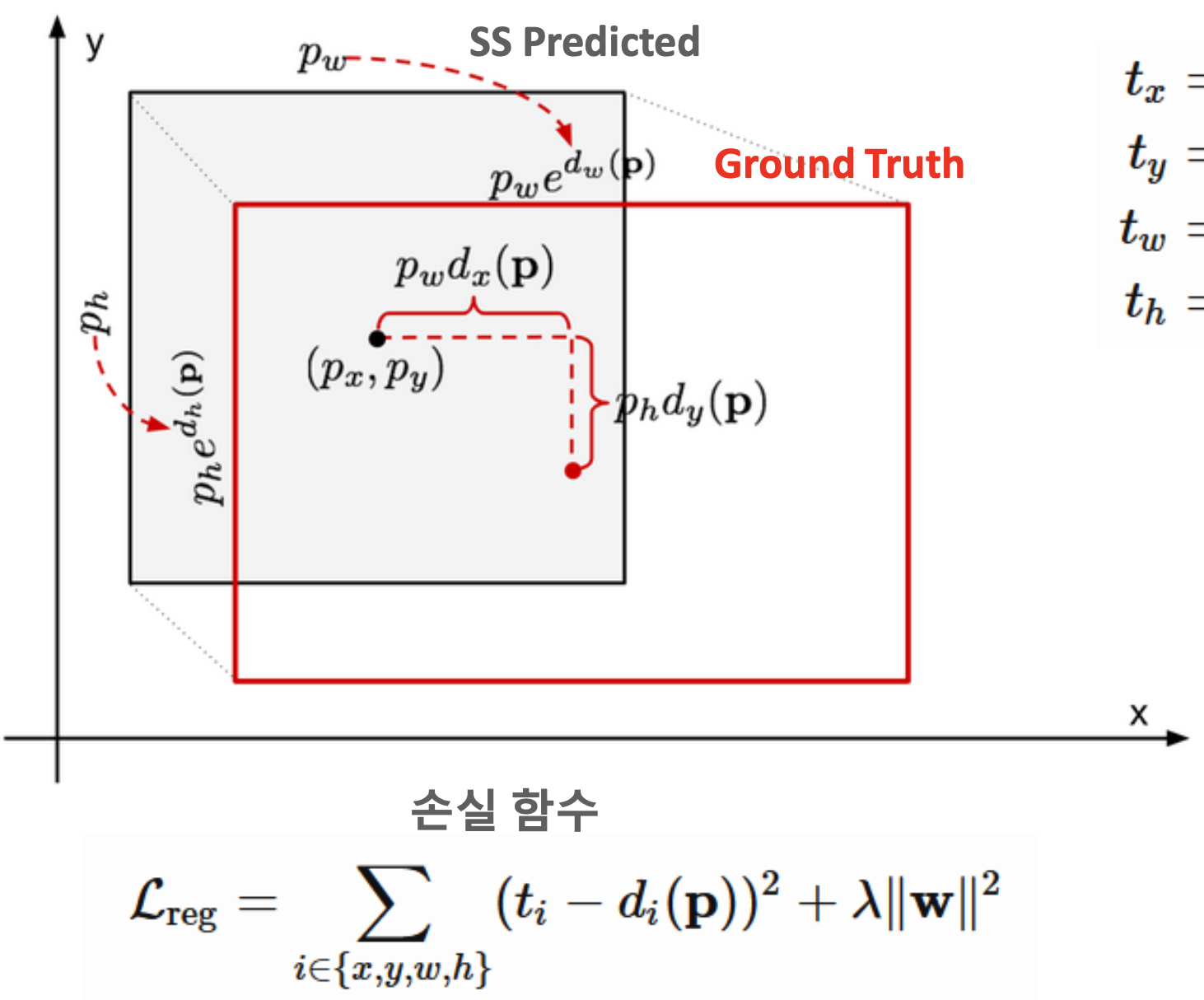
- bounding box와 Ground truth의 각 중심점 간 거리가 최소가 되도록 학습
- 우리가 원하는 건 bounding box 변수 P에 대한 tranformation(기존의 vector(여기서는 bounding box P)를 다른 좌표 공간으로 정의하여 달리 표현(여기서는 G_hat)) 함수
- transformation 함수는 CNN layter 중 weight vector가 가미된 손실함수.
- 손실 함수 상에서 사용된 가중치를 학습시키기 위해 ridge regression을 사용하여 regression target를 정의
- 전반적인 bounding box regression의 경우 RCNN상 Selective Search로 찾은 약 2K image에 대해 모두 진행하지 않고 특정 IoU threshold 이상은 값을 가지는 것에 대해서만 진행
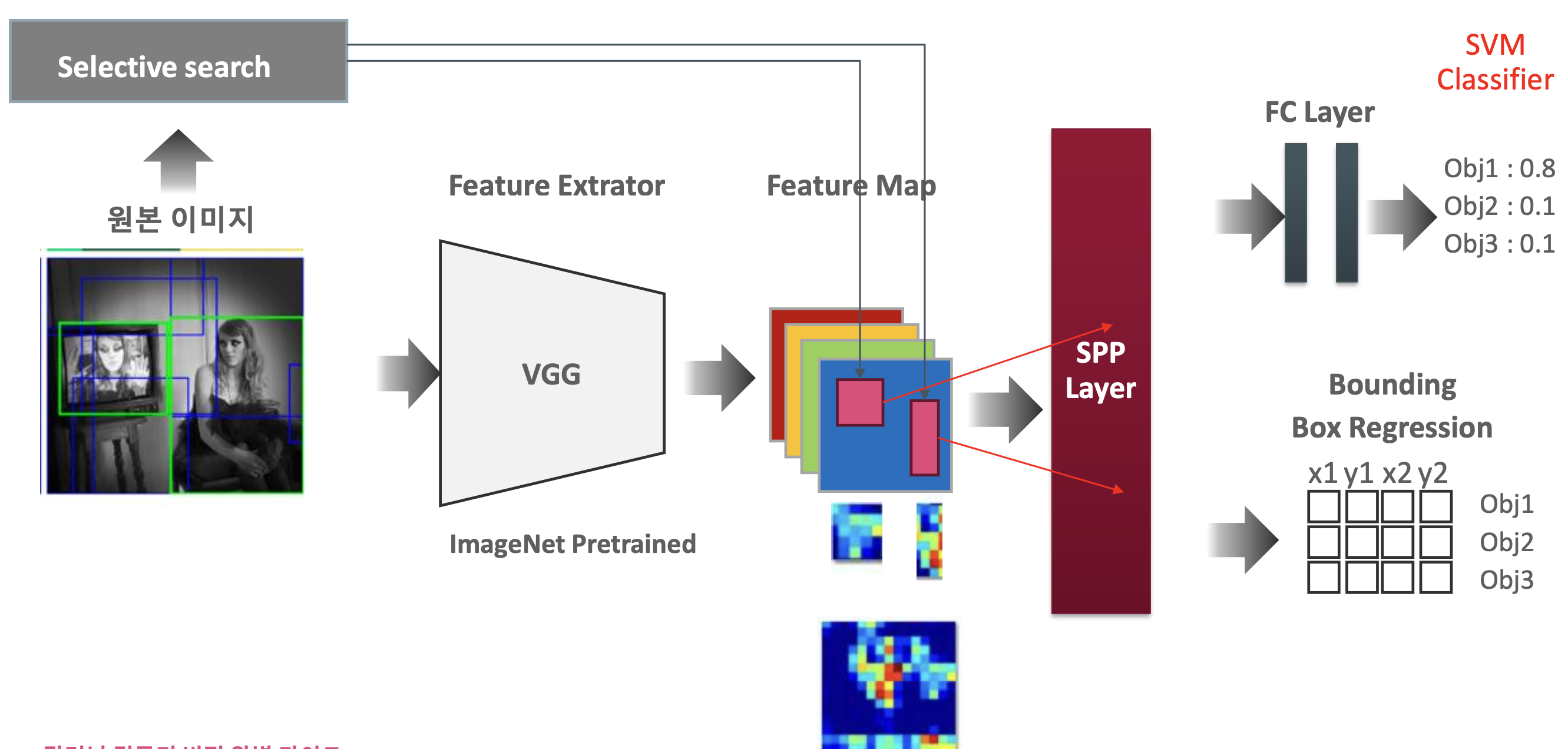
2. SPP(Spatial Pyramid Pooling) Net
- RCNN의 문제점
- detection 시간이 너무 오래 걸림
- image crop & warp로 인해 원래의 이미지가 아닌 다른 이미지로 인식이 됨.
RCNN 개선 방안
- 원본 이미지에 대해 feature map을 만든 후, bounding box에 대한 부분을 feature map에 mapping하면 해결 될 것으로 보였으나, dense layer 1D FC input size가 고정되지 않아 진행할 수 없었음.
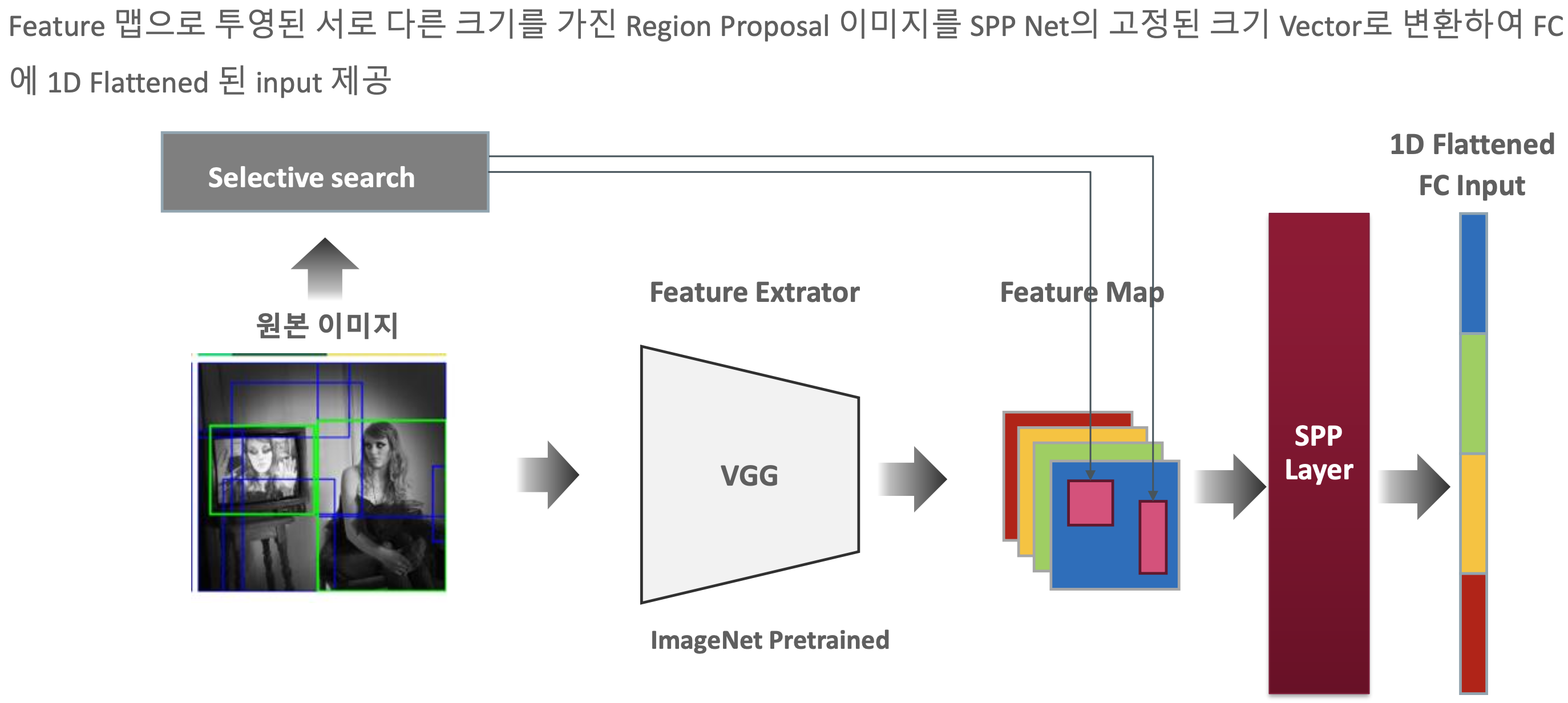
- 이에 대해 SPP layer를 추가하여 서로 다른 크기를 가진 이미지를 vector로 변환하여 dense layer인 1D FC input을 제공하게끔 함.
- SPP는 CNN image classification에서 서로 다른 이미지의 크기를 고정된 크기로 변환하는 기법으로 소개, 이는 Spatial Pyramid Matching 기법에 근단을 둠
- SPM(Spatial Pyramid Matching) : 이미지를 grid layout(위치)을 기반으로 하여 각 feature들이 위치 별로 얼마나 분포하고 있는 지를 파악한 후, 각 위치 별 가장 빈번한 feature의 특성이 반영된 새로운 속성들이 생김. 새롭게 확인된 속성들을 이용하여 새로운 분류를 할 수 있게 됨. 결국 파생 변수…아이디어 싸움
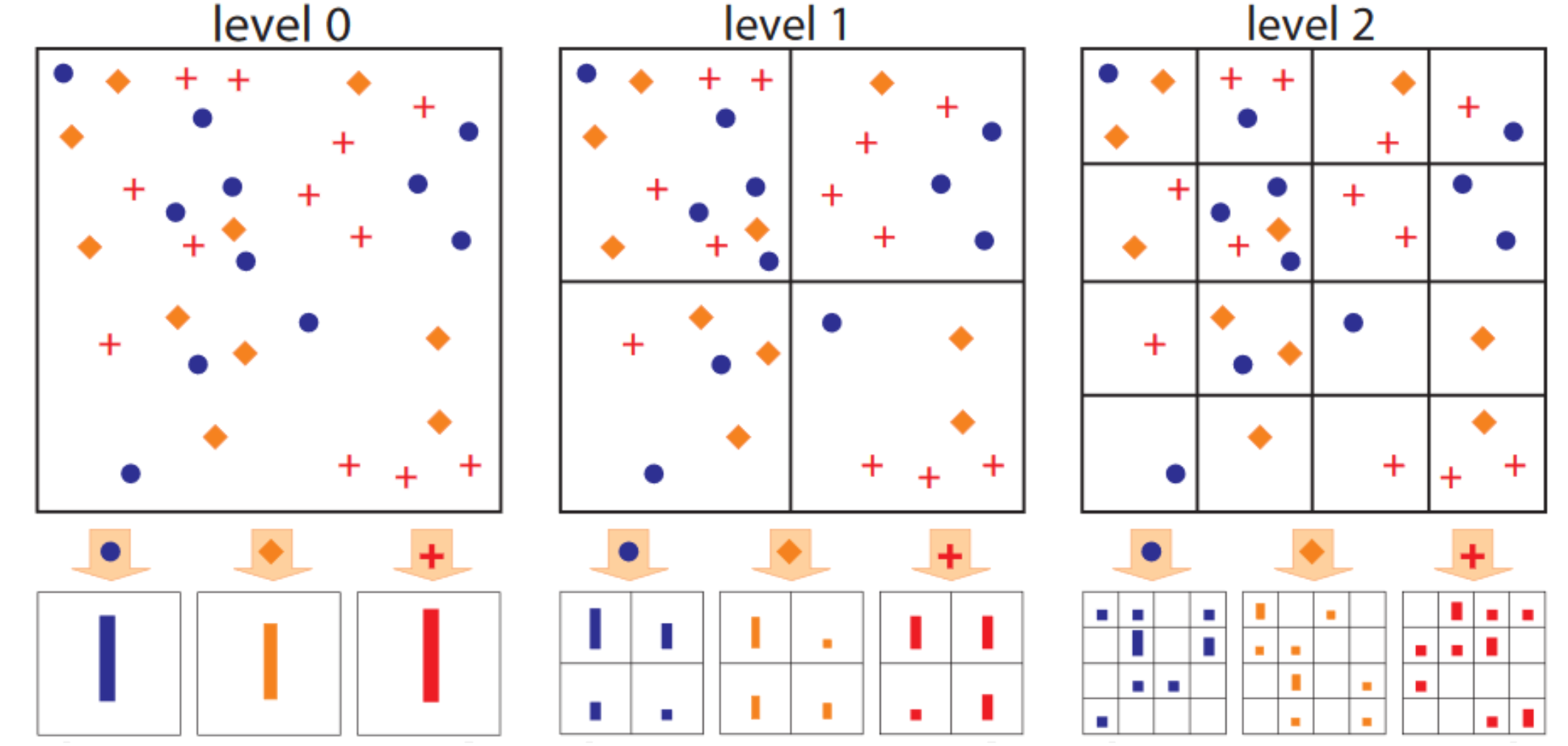
- 결국 SPP는 위의 SPM에 max pooling만 추가 적용한 것임.
- 여기서 질문.. 서로 다른 feature map size임에도 불구하고 SPP를 적용하여 문제를 해결할 수 있으나, 2n x 2n의 feature들이여야 1,4,12분면으로 만들 수 있는 거 아니니?
RCNN의 발전
- R-CNN : 한 image에 대해 2천개의 bounding box를 모두 학습하여 별도의 SVM을 통해 classification
- SPP layer 도입
- Fast R-CNN : 여전히 Selective Search포함되어 있으며 spp layer를 ROI pooling으로 대체. 또한 SVM이 삭제되고 다시 softmax를 도입. End-To-End Network learning(ROI는 제외), Multi-task loss 함수로 classification과 regression를 함께 최적화(loss 줄이기)
-
Fater R-CNN : RPN이 추가됨.
- ROI : 방법론이 어떻든 region proposal로 제시된 영역을 일컫는 것으로 보임.
Fast R-CNN
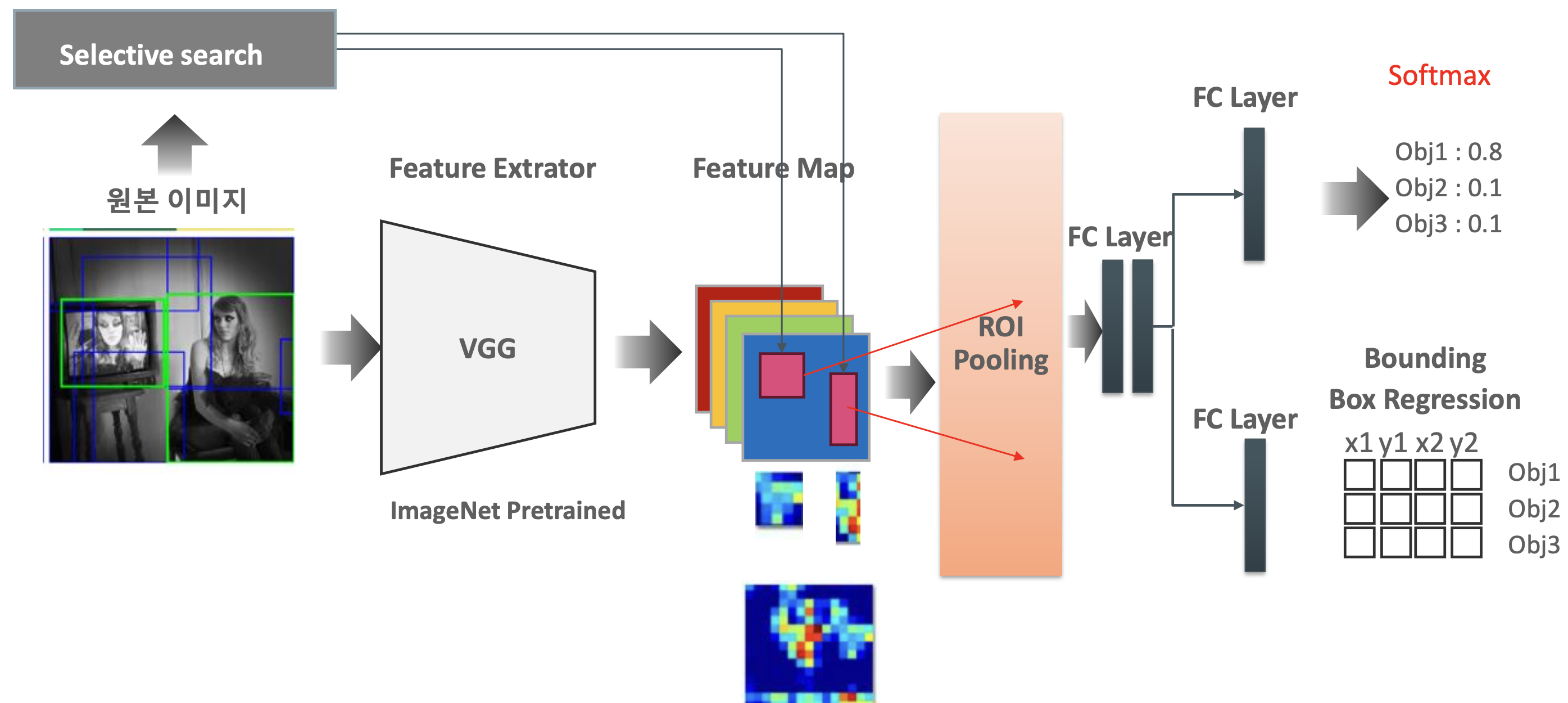
- 원본 이미지에 대해 한 번만 학습하여 feature map을 만듬
- Selective Search로 찾은 bounding box에 대하여 이미 만들어놓은 feature map에 mapping
- ROI logic을 적용하여 resizing, max pooling을 적용하여 크기에 상관없이 정해진 feature extract
- FC layer > softmax를 통해 분류
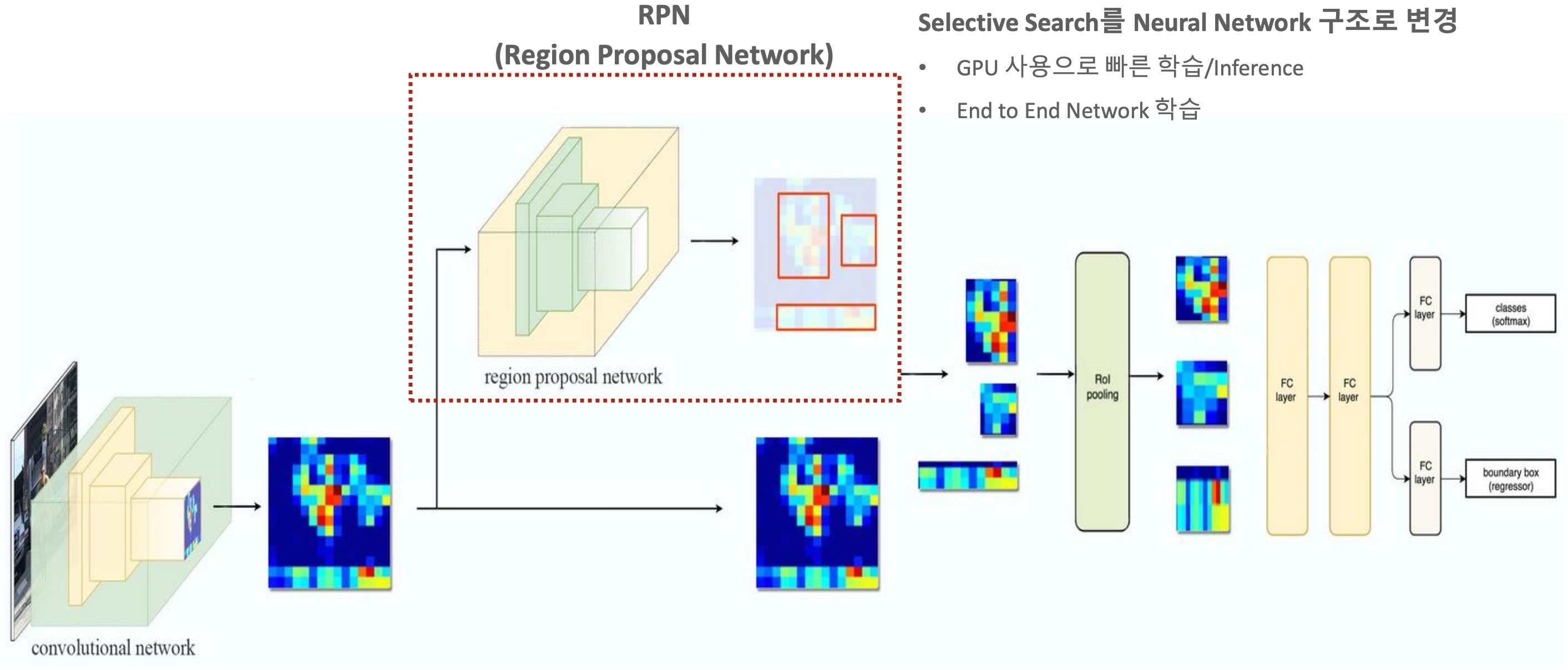
Faster R-CNN
- RNN + Fast R-CNN
- object detection을 구성하는 모든 요소들을 모두 딥러닝만으로 구성한 첫 알고리즘
- Selective Search를 통한 ROI logic을 RPM으로 대체
- GPU 사용으로 빠른 학습
- end-to-end Network 학습
- 다른 네트워크 개입없이 하나의 네트워크만으로 전체 파이프라인 네트워크를 이루는 것으로 보임.
- 병렬 처리가 안된다는 안점?이 존재할 거 같다.
- 분석이 리소스에 의존적이다. 메모리 제한
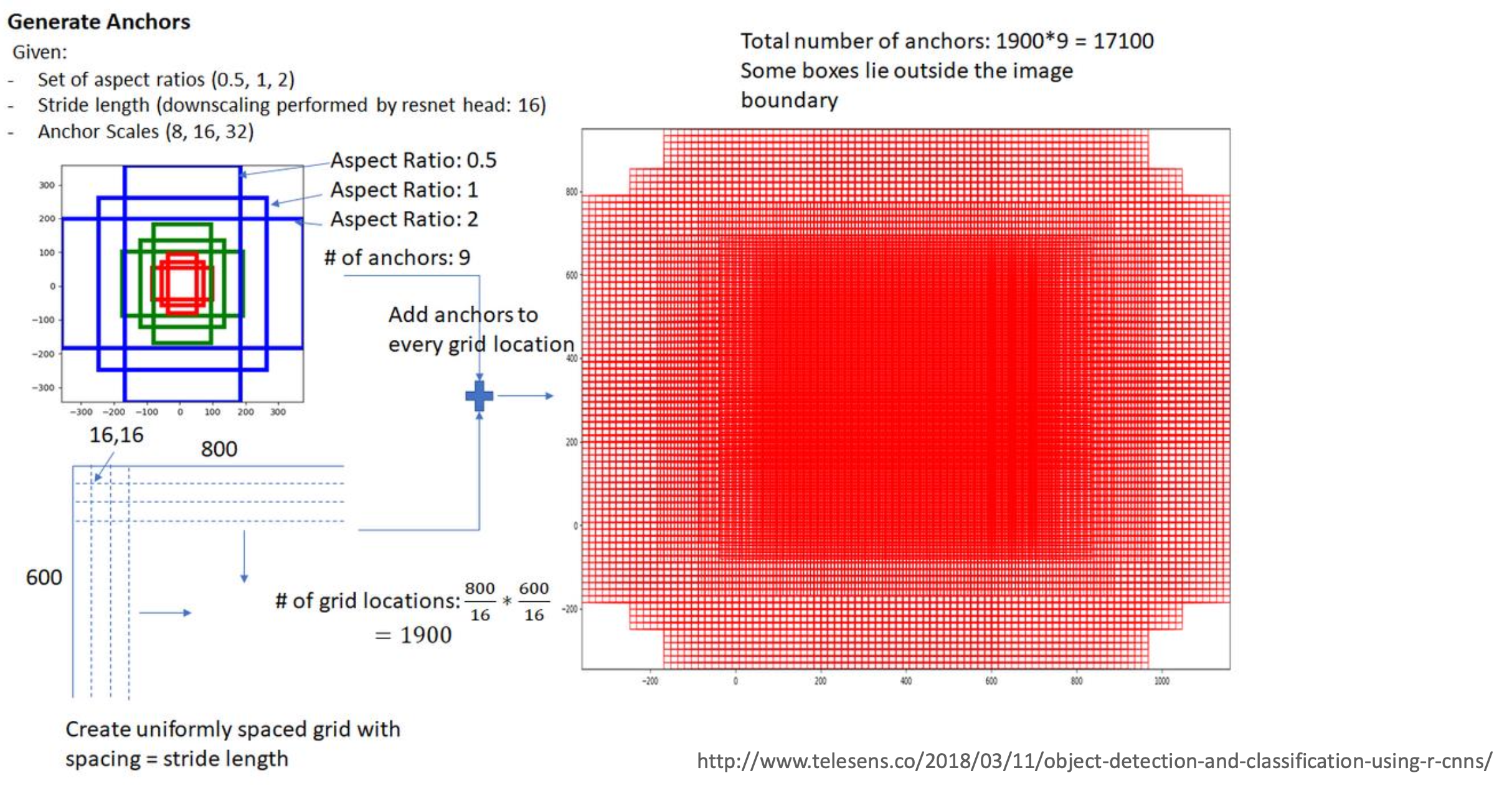
Anchor Box
- Selective Search를 대체하여 end-to-end network의 기반이 된 기술
- 형성된 feature map을 기준으로 각 grid(value …)를 기준으로 다음의 특징을 가지는 anchor box를 작성
- 1배수, 2배수, 3배수 // 1:1, 1:2, 2:1으로 총 9개의 anchor box 적용하는 것이 일반적
- 근데 yolo v2는 coco 데이터 셋의 bounding box에 k-means clustering을 적용해보니 anchor box를 5개로 설정하는 것이 precision과 recall측면에서 좋은 결과를 낸다고 결론지음.
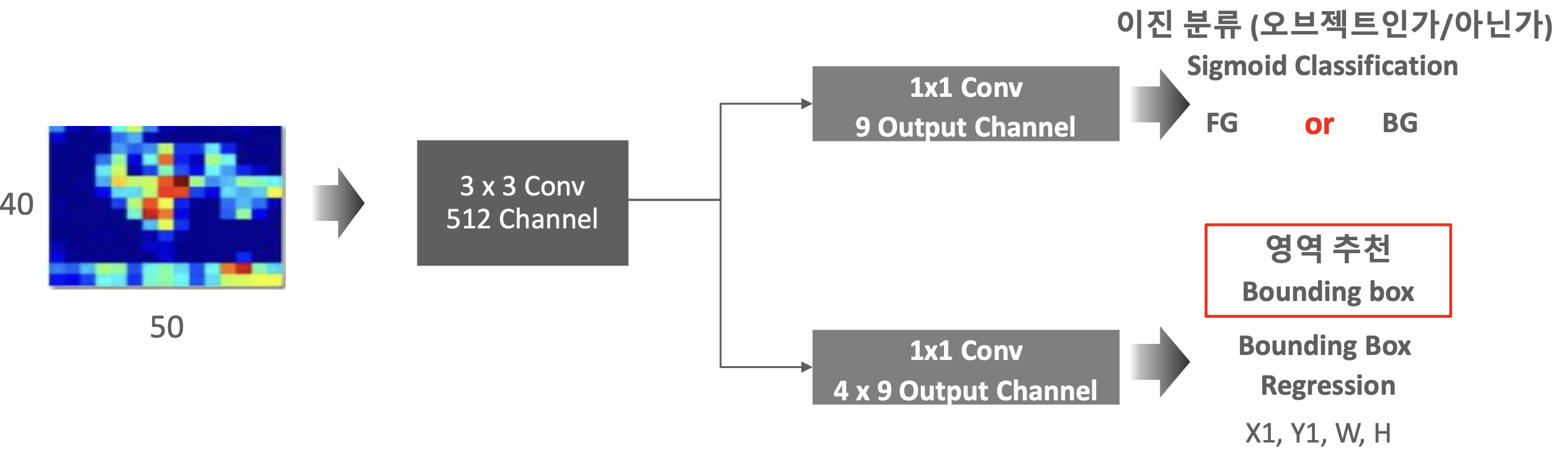
RPN Network
- 원본 이미지를 이용하여 feature map(n x m x c)을 얻는다.
- feature map에 대하여 3x3 conv 연산을 적용한다. 크기에 변화가 없도록 padding을 추가한다.
- 1x1conv을 통하여 channel이 축소화 된 2가지의 feature map을 출력하는데..
-
- 이진 분류(object가 있나? 없나?)를 위한 feature map 출력
- 1x1conv을 이용한 9(anchor boxs) channel feature map
- bounding box(x, y, w, h)를 위해 1x1conv를 이용한 4(bb coordinate)x9(anchor box) channel feature map
-
근데 RPN에 대해 다른 자료들을 찾아보면 이진 분류를 위한 feature map은 9개가 아니라 9x2 channel의 feature map을 출력한다고 기입되어있음. 이 때의 2는 object가 있냐 없냐에 대한 binary class의 수이고, bounding box coordinate에 해당하는 좌표 정보의 갯수의 컨셉과 동일한 것으로 추정. 설마 sigmoid로 하면 9 channel로 구성해도 알아서 2배수로 해주는건가…
Sigmoid vs Softmax
| N | Sigmoid | softmax |
|---|---|---|
| 1 | binary-classification | multi-classification |
| 2 | sum of P != 1 | sum of P == 1 |
| 3 | output is not real P | real P |
RPN Network configuration
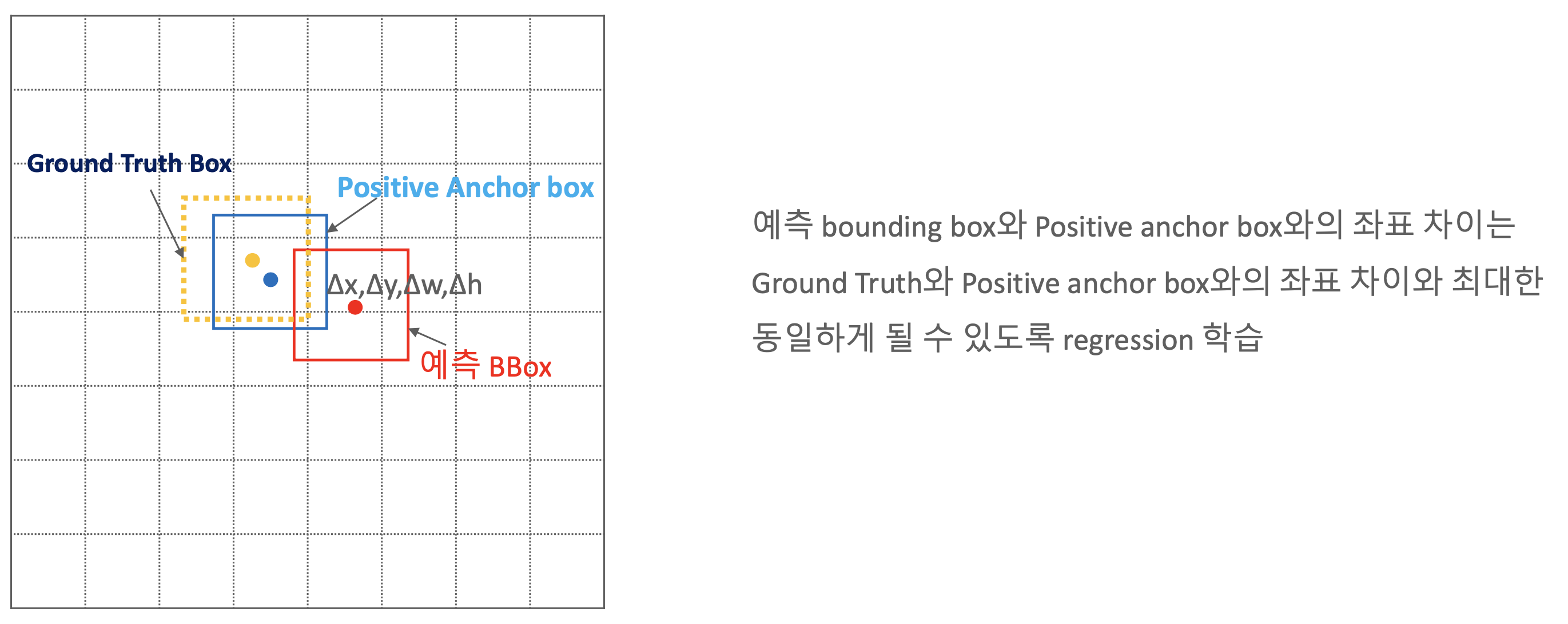
Positive, Negative anchor box
- 모든 anchor box에 대해 RPN bounding box reg를 적용하지 않는다. 왜? 너무 많으니까
- ground truth와 anchor box간 IoU를 이용하여 positive와 negative로 구분함.
- IoU가 0.7 이상이거나 가장 높은 anchor는 positive
- IoU가 0.3보다 낮으면 Negative
bounding box regression
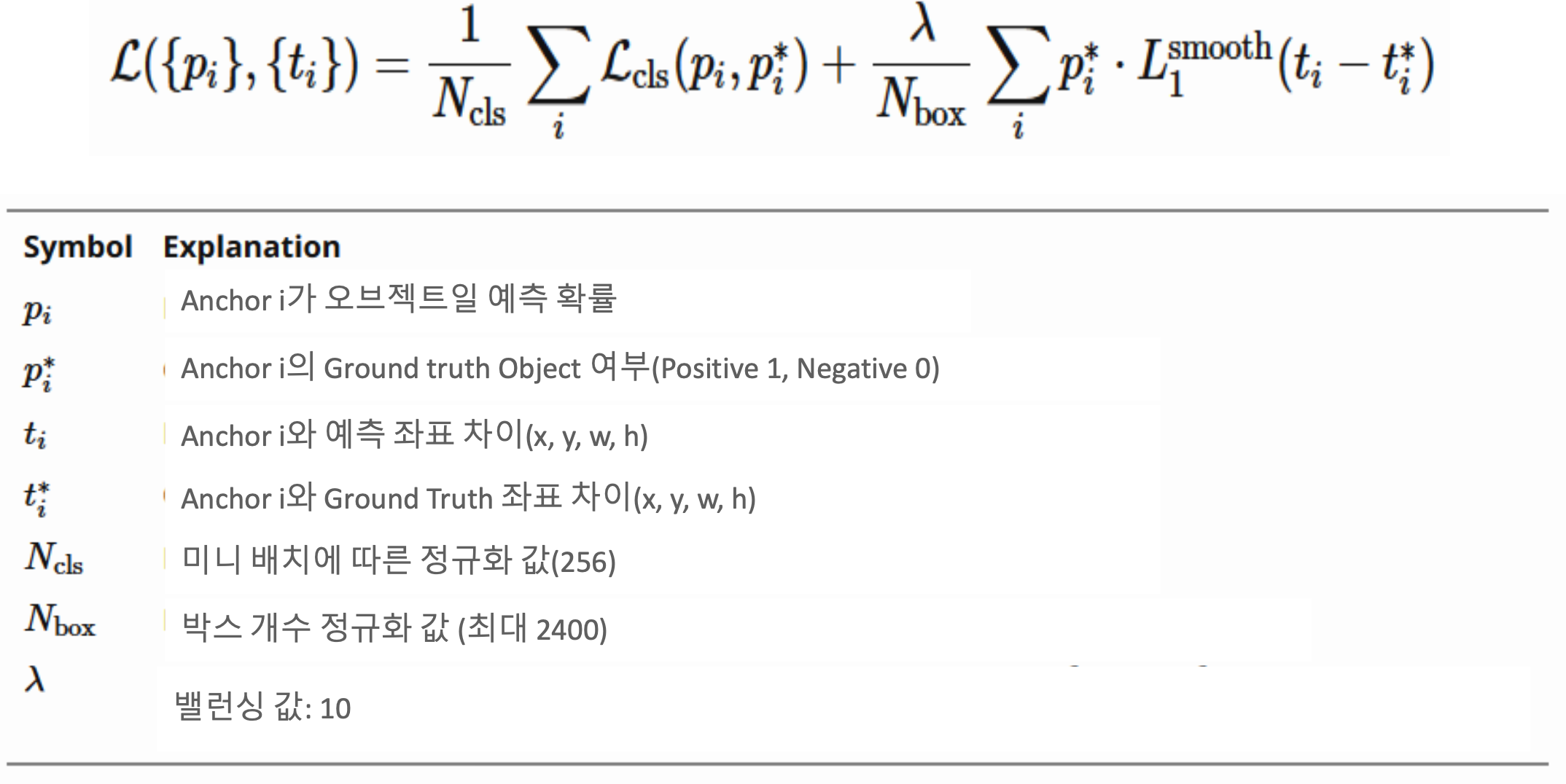
RPN 손실함수
Faster R-CNN training
- RPN을 선행 학습
- Fast RCNN Classification / Regression 학습
- 2의 loss를 이용해 RPN을 fine tuning
- 전반적인 process를 진행
RCNN Summary
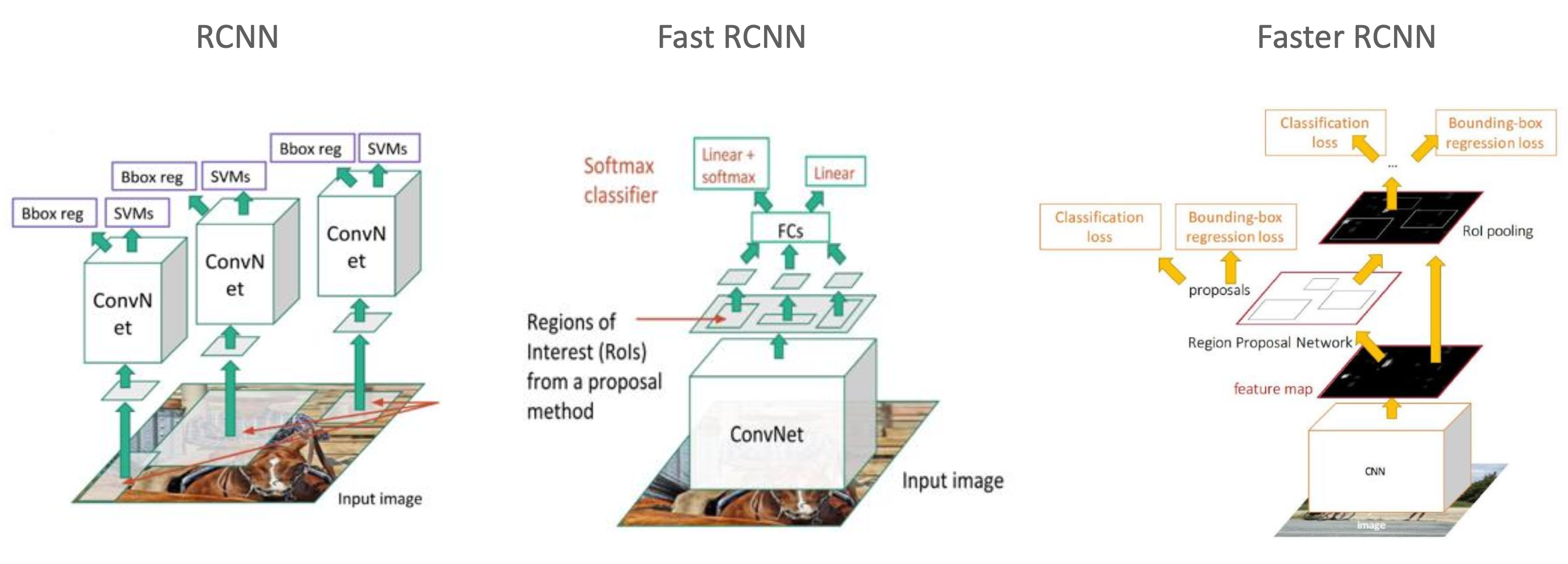
- RCNN : Selective Search로 인한 2000개의 conv를 적용하여 시간이 오래걸리는 단점
- Fast RCNN : RCNN의 문제점을 해결하기 위해 ROI를 적용하고 SVM 제거
- Faster RCNN : Selective Search를 제거하고 RPN을 통해 딥러닝으로만 구성된 네트워크